2018.08.02 - SLAM
はやぶさ2ミッションへ、Qoncept vSLAM が貢献します!
Qonceptとモルフォによる宇宙探査イノベーションハブ事業「テクスチャレスシーンのためのロバストなVisual SLAMの研究」の成果によるvSLAM技術が、はやぶさ2ミッションのタッチダウン運用などに貢献することが、はやぶさ2記者説明会(2018年8月2日)で報告されました
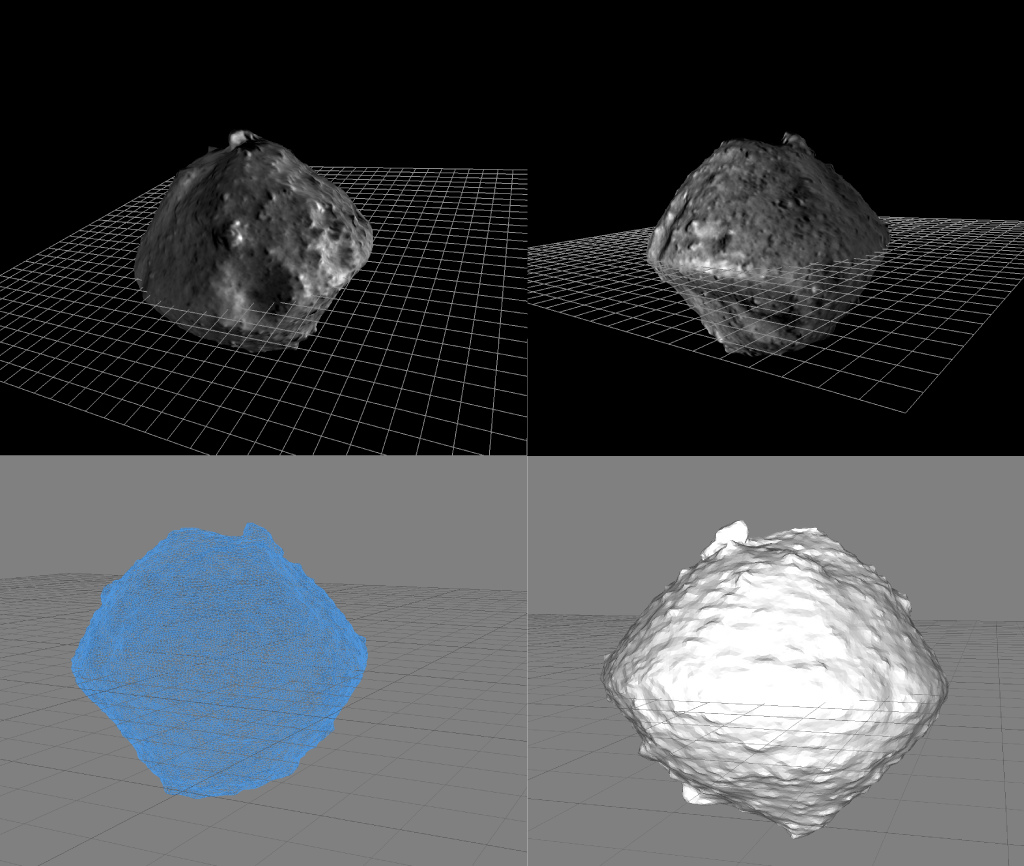
Qonceptは、はやぶさ2から受信した複数枚の静止画像から、リュウグウの3次元形状復元処理を行い、精密な3Dモデルデータを作成します。今後この3Dモデルデータを使った閲覧アプリやVR体験アプリによって、リュウグウの形状や大きさ、はやぶさ2の動きなどをわかりやすく可視化する予定です。
宇宙探査イノベーション事業について
- テーマ:テクスチャレスシーンのためのロバストなVisual SLAMの研究
- 研究内容:Visual SLAMの動作環境をより広げるため、従来の特徴点ベースSLAMに加えて、エッジ情報や、わずかな陰影を特徴量として利用するなど、シーンごとに適する特徴を切り替えることの可能な統合型のVisual SLAMの開発